中
ENG
首页
企业简介
关于我们
产品中心
柔性驱动器
柔性灵巧手
柔性臂
仿生柔性机器人
新闻中心
公司新闻
联系我们
联系我们
联系表格
搜索
赢柔机器人
中
En
首页
企业简介
关于我们
产品中心
柔性驱动器
柔性灵巧手
柔性臂
仿生柔性机器人
新闻中心
公司新闻
联系我们
联系我们
联系表格
首页
>>
产品中心
>>
柔性驱动器
>>
多模态气动人工肌肉
柔性驱动器
柔性灵巧手
柔性臂
仿生柔性机器人
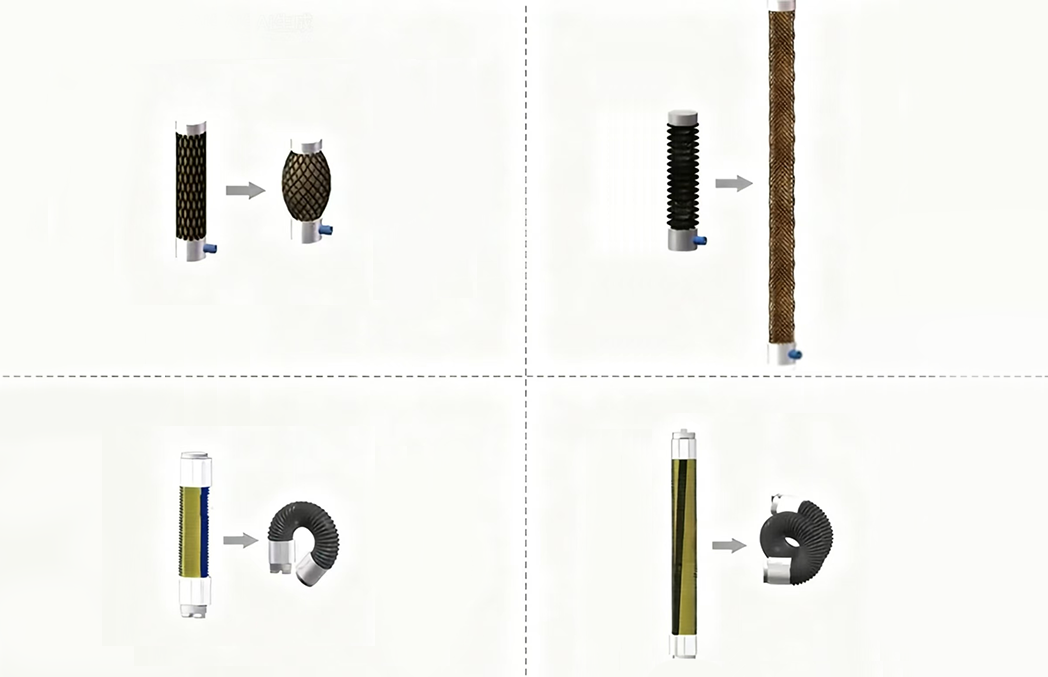
多模态气动人工肌肉
产品详情
产品参数
产品图片
多模态气动人工肌肉基于仿生机器人技术,通过模仿生物肌肉,可在单一器件内实现伸缩、弯曲、扭转等多种运动模式,相比传统单一运动模式的驱动器,具备更高的环境适应性和灵巧性。
Top